PFTrack
- 対応OS
By
ノードベースの3Dトラッキング&マッチムーブ スタンドアロンソフト



ノードベースの3Dトラッキング&マッチムーブ スタンドアロンソフト
PFTrackをご検討のお客様は以下よりご希望の製品と数量をお問い合わせフォームよりお知らせください。別途お見積り致します。現在販売しているPFTrackのライセンスは以下となります。
PFTrack、PFCleanの永続ライセンスをお持ちのユーザーを対象に年間メンテナンスの販売を再開します。以前に永続ライセンスを購入したユーザーは、年間メンテナンスに加入することで最新バージョンにアップグレードできます。年間メンテナンスの販売価格はメンテナンス失効からの経過年数により異なります。尚、メンテナンス失効から2年以上経過した場合はメンテナンスへの加入はできません。
年間メンテナンスをご検討の方はお見積りいたしますのでお問い合わせください。
PFTrackはスタンドアロンの3Dマッチムーブ/トラッキング ソフトウェアです。 撮影した映像を3Dトラッキングして特徴点を取り出すだけではなく、カメラの動きも再現します。
3Dトラッキングはもちろん、映像の中のオブジェクトを参照しながらモデリングする「イメージ ベースド モデリング機能」、映像中のオブジェクトの動きを抽出する「オブジェクト トラッキング」機能、奥行きを計算しグレースケールマップを生成する「Z-Depth」機能を搭載。さらに、映像中のオブジェクトにOBJデータをトラッキングさせる「ジオメトリ トラッキング」も可能です。
トラッキングデータ、モデリングデータ、再現したカメラのデータは、After Effects(.ma)、.OBJ、Autodesk FBX、.LWS、Nuke Python Script、等々のデータでエクスポートできます。主要な3DCGソフトウェア、コンポジットツールに使用できるため幅広く応用することができます。
PFTrack バージョン2020からは、アプリケーションのコードが書き換えられ、刷新されたユーザーインターフェイス、新しいカメラとレンズのメタデータツール、様々なワークフローの効率化が実装されました。
実写とCGオブジェクトの合成、プリビズに必要なシーンの再構築、建築シミュレーション、VFXコンポジット用のデータ、多くのシーンに必要なデータをPFTrackひとつで実現します。
PFTrackは、カメラ、オブジェクト、ジオメトリなどの日常的なマッチムービングニーズに対応する幅広い自動および手動ツールを提供します。この包括的なスイートは、無比の精度を確保し、シームレスな統合と卓越した結果をもたらします。
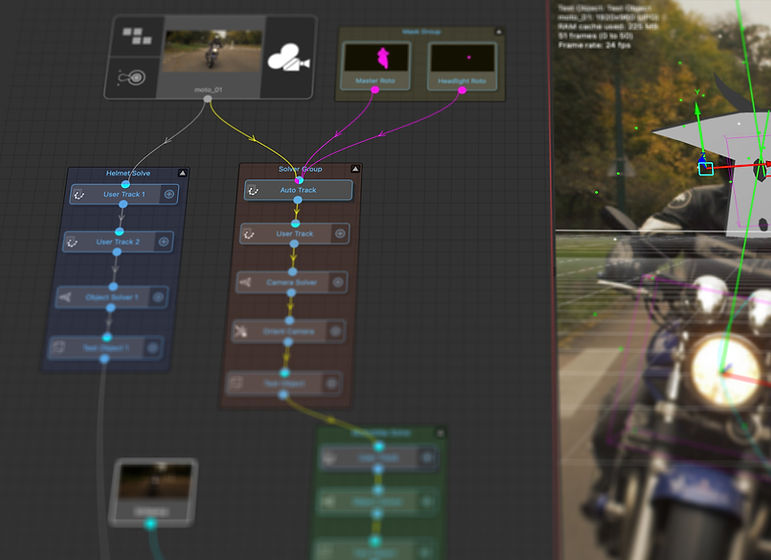
PFTrackの信頼性の高いワークフローと直感的なユーザーインターフェースは、少数ノードを持つ小規模プロジェクトから、複数のブランチにまたがる大量の3Dデータを生成する大規模なノードツリーまで、複雑なタスクを迅速かつ柔軟に、そしてシンプルに処理します。

高級なアナモルフィックレンズから市販の球面レンズまで、歪みが発生した際には、PFTrackの信頼できる歪み補正ツールが解決します。グリッドからのキャリブレーション、STマップのサポート、非歪みプレートのエクスポートなどに対応しており、PFTrackはレンズディストーション補正パイプラインの中心となります。
PFTrackの拡張可能で業界をリードするメタデータサポートで、あなたのVFXワークフローを向上させましょう。PFTrackは競合製品よりも速く結果を提供します。

PFTrackの直感的なユーザーインターフェースを使用すると、Lidarサーベイデータを簡単にプロジェクトに取り込むことができ、シーンに追加するカメラやバーチャル要素が物理環境と正確に一致するように調整できます。
PFTrackの強力なフォトグラメトリ機能を使用して、正確なカメラ配置を実現し、静止画像やビデオ映像から3D環境を同時かつ簡単に再現できます。
高度な画像解析および特徴マッチング技術により、PFTrackは複雑なカメラの動きを扱うことができます。これには、低照度環境、速い動き、または遮蔽などの困難な条件も含まれます。PFTrackの精度と信頼性は、マッチムービングのプロフェッショナルと初心者の両方から信頼される選択肢です。
PFTrackは、あらゆるカスタムスタジオパイプラインに対応します。Pythonスクリプト、ユーザー作成のマクロ、コマンドラインツール、共有可能なユーザープリセットなどを使用して、ワークフローをカスタマイズし、効率化できます。

1つのクリップから、多くの価値ある3Dデータやアセットを生成し、様々な業界標準フォーマット(PixarのUSDなど)で簡単にエクスポートできます。これにより、好みのワークフロー、アプリケーション、プラットフォームにシームレスに統合できます。
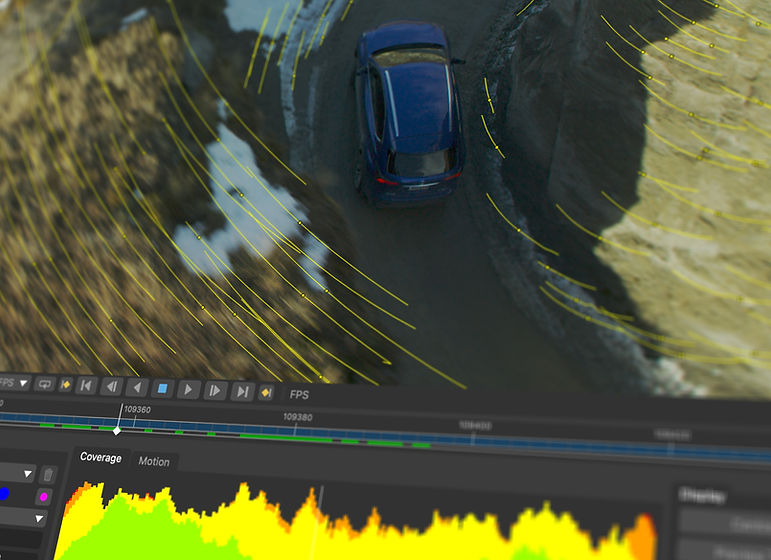
自動でカメラまたはオブジェクトのソルブ(解析)を行い、トラッカーを生成します。 クリップ全体を追跡し、常にベストなトラッカーを選択していきます。トラッカーの数はパラメータで調整でき、それらのトラッカーはクリップの前後をトレースします。また、カメラがフリーで動くのか、止まっているのか、回転だけなのかを指定できます。トラッキングが不要な部分はマスクを作成することができます。生成されたトラッカーはカーブエディタに表示され、編集することができます。
手動でカメラやオブジェクトをソルブ(解決)するトラッカーを設定します。ノードには複数クリップを入力することができます。同時に複数クリップにトラッカーを配置することができます。複数カメラのソルブ、リファレンスフレームのカメラソルブが可能です。「Enhance」タブでは簡易的なキーイングや色調調整ができるので、マーカー検出や簡易合成を行い精度を高めることもできます。 ユーザ トラックとオート トラックを併用することでトラッキングの精度が上がり、良い結果を得ることが可能です。
オート トラック、ユーザ トラックそれぞれのトラッカーからカメラの動きを算出する機能です。トラッキング ポイントのモーションパス、焦点距離などのカメラパラメータ、それらを総合的に参照しながら運動変換を行います。生成されているトラッカーポイントの影響を大きく受けるので、良質なトラッキングポイントを取り出しておくことが重要となります。密度、数、フレームに長く存在してるかによってカメラソルブの結果も変わってきます。さらに、より正確にカメラ位置を特定するためにはトラッキング ポイントは手前と奥の両方に適度に必要となります。
オート トラック、ユーザ トラックを使用しカメラ モーションが生成された後、映像中のオブジェクトの動きを算出する機能です。ソルブに参照するトラッキング ポイントを選択することができます。カメラ ソルブと同様に良質なトラッキングポイントを取り出しておくことが重要となります。シングル ビューポイントでトラッキングする場合は全体のスケールを手動で調整する必要があります。
OBJファイルのようなポリゴンメッシュをダイレクトに用いて映像中の動いている物体をトラッキングする機能です。 トラッキングしたい物体が、人物の頭やプリミティブな形態の場合、このジオメトリ トラックは非常に有効となります。 単純なカタチのトラッキングばかりではなく、OBJのメッシュをトラッキングした物体に割り当てて可変する物体のトラッキングも可能です。例えば人間が話をしている時の顔の口や頬の動きのトラッキングです。割り当てたメッシュのウェイト(影響力)も設定できます。よく動く部分、あまり動かない部分をペイントツールで柔軟に設定できます。
映像からグレースケール デプス マップ(Open EXR)、3Dメッシュデータを生成します。ノードには複数クリップを入力できます。例えば、別の角度から撮影されたシーンを2つ入力し、映像間の対応するピクセルの移動から奥行き(Depth)を算出します。ハイライトの部分などにマスクを活用するとより正確にデプスマップを抽出できます。
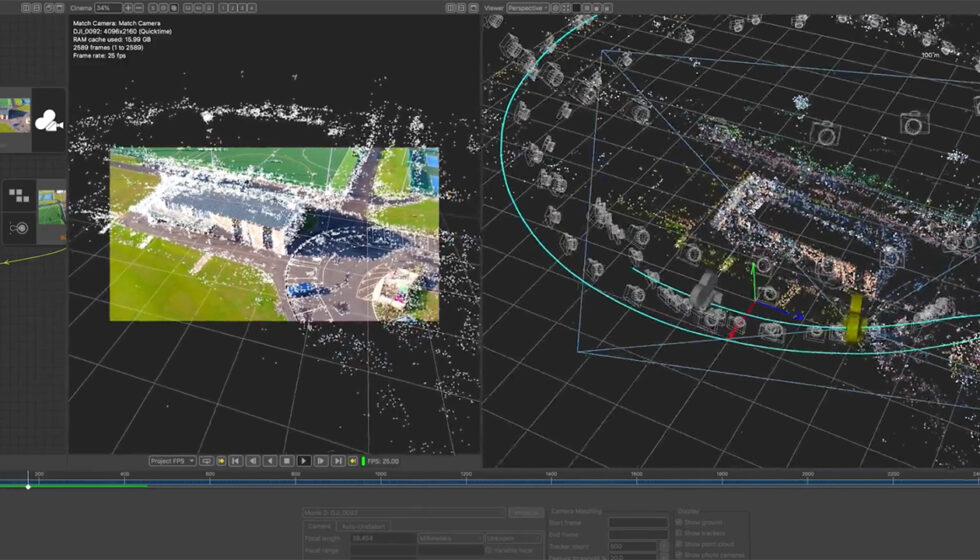
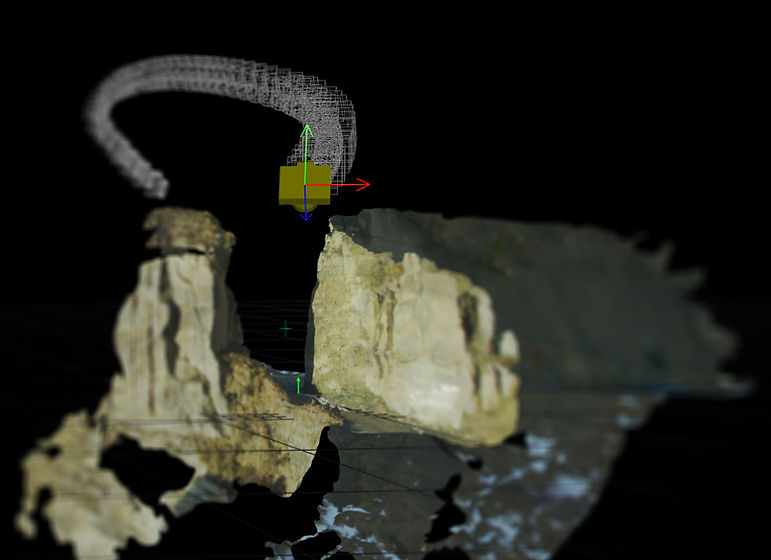
Photo Surveyノードは、自動的に3Dポイントクラウドを生成します。静止画像間で一致する特徴点を解析します。静止画を撮影した各カメラの位置情報を割り出し、それらを元にポイントクラウドを構築します。Photo Surveyノードに撮影された複数の画像クリップ、もしくは連続した画像シーケンスをノードに入力して処理を行います。カメラ位置とポイントクラウドの構築後、シーンの全体的な規模をOrient Sceneノードで設定することができます。一度構築したシーンにSurvey Solverノードで移動するカメラを追加することが可能です。
また、ポイントクラウドとカメラの情報をExportノードを使用して他のアプリに使用できる形式で出力することができます。EXIF(デジタルカメラのメタデータを含むファイルフォーマット)ヘッダ情報が持っている、各画像のカメラの焦点距離情報を使用することができます。
上記画像は、100枚の画像からポイントクラウドとカメラ位置を解析した図です。撮影する画像は多いほど全体をカバーできます。シーン構築をより正確にするため、様々な位置から撮影して視差が出るように配慮する事が重要です。また、ポイントクラウド生成は、画像間で共通する特徴点が多ければ多いほど、正確に生成できます。
PFTrackには強力な新しいプロジェクトマネージャーが搭載され、素早くプロジェクトが作成でき、全く新しいタグと検索機能でプロジェクトを管理できます。
刷新されたUIによるユーザーエクスペリエンスの向上、ダイナミックウィンドウマネージャーの提供、ハイレゾディスプレイのサポートなどの新機能が搭載しました。
メディアのインプット/アウトプット機能全体が改善。新しいインプットノードはメタデータの取り扱いが大幅に改善。メディアインポートブラウザの改善により作業効率がアップ。ディレクトリとファイルのインプット/アウトプット取り扱いパフォーマンスが向上。
新しいカメラプリセットマネージャーは、ユーザー生成のカメラバック、共有可能な動画カメラとフォトグラメトリスチルカメラのモデルのレンズライブラリをサポート
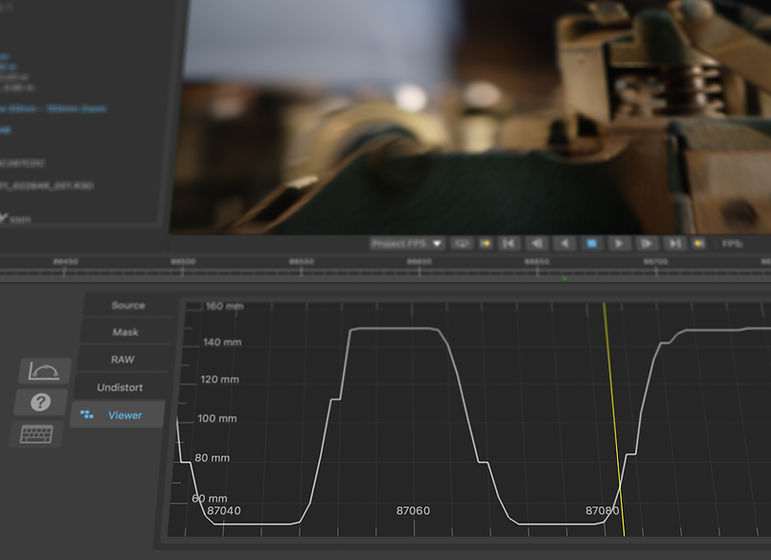
レンズディストーションプリセットを作成する際に新しい自動キャリブレーション検出の機能を搭載したレンズディストーションのパイプライン。アナモルフィックディストーションモデル、レンズブリーズ(焦点距離の変更)の自動補正、ST-mapsのサポートが拡張。
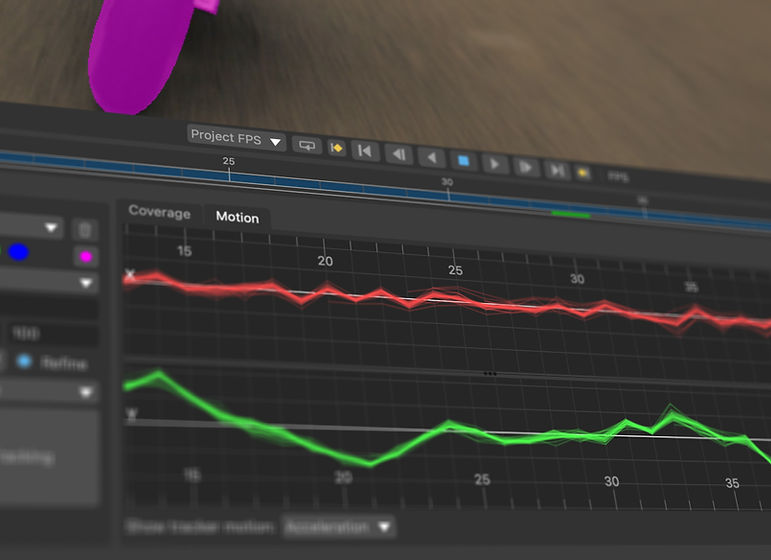
RAWムービーファイル形式での埋め込みメタデータ管理が拡張。新しいメタデータ解析ツールが搭載。動画カメラデータ、焦点距離、カメラの向き、F-curvesからイメージデータへの同期などが改善。
フォトグラメトリーのパイプラインがアップデート。
既存のノードが改善され、ワークフローが効率化されました。
トラッキングデータ、カメラデータ、デプスマップ、ポイントクラウド、などを主要なアプリケーションに出力することができます。
| 出力フォーマット | カメラ | グループ | トラッカー | ジオメトリ | デフォーマブル ジオメトリ | テクスチャ | モーションキャプチャ | スパースポイントクラウド | 高密度ポイントクラウド | 背景クリップ |
|---|---|---|---|---|---|---|---|---|---|---|
| After Effects (.ma) | √ | √ | √ | √ | ||||||
| Alembic 1.7.10 | √ | √ | √ | √ | √ | √ | √ | √ | √ | |
| Alias|Wavefront OBJ | √ | √ | √ | √ | √ | |||||
| Apple Motion | √ | √ | √ | √ | ||||||
| Autodesk 3ds Max Script | √ | √ | √ | √ | √ | √ | √ | √ | ||
| Autodesk FBX | √ | √ | √ | √ | √ | √ | √ | √ | √ | |
| Autodesk Maya | √ | √ | √ | √ | √ | √ | √ | √ | ||
| Autodesk Softimage dotXSI | √ | √ | √ | √ | √ | √ | √ | √ | ||
| Collada DAE | √ | √ | √ | √ | √ | √ | √ | |||
| Flair MRMC Carts Raw | √ | |||||||||
| Kupercontrol ASCII | √ | |||||||||
| LIDAR Ascii XYZ/RGB | √ | √ | √ | |||||||
| Newtek Lightwave LWS | √ | √ | √ | √ | √ | √ | √ | √ | ||
| Nuke Python Script | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ |
| Pixar USD | √ | √ | √ | √ | √ | √ | √ | √ | √ | |
| PLY Binary | √ | √ | √ | √ | ||||||
| PTS Ascii | √ | √ | √ | |||||||
| Side Effects Houdini Script | √ | √ | √ | √ | √ | |||||
| XML Camera | √ |
Pixel Farm社製品をご注文の際には、開発元でのアカウント(PFAccount)登録が必須となります。製品ライセンスはご登録されたPFAccountに付与される形になります。
既にPFAccountをお持ちの方は、チェックアウトの際にアカウント番号(PFACCで始まる番号)をお知らせください。アカウントがない場合は、開発元が作成致しますので、アカウントに使用するEmailアドレスをお知らせください。
Pixel Farm社がPFTrackのDiscovery/デモ版の提供を開始しました。これにより開発元へのデモ版申請が必要なく、お気軽にPFTrackの機能をお試しいただけます。ぜひご利用ください。
PFTrack Discovery/デモ版 (WINDOWS版)
PFTrack Discovery/デモ版 (MAC版)
※Discovery/デモ版は、プロジェクトの保存、ファイルのエクスポート、Python Scripts、コマンドラインツール、マクロスクリプトはできません。
PixelFarm 社製品は、1ライセンスにつき、1台のコンピューターで使用頂けます。(ライセンスは、Windows、Macintosh、Linux 共通で使用できるハイブリッド仕様です)